立体视觉
提示
立体视觉
一个典型的双目结构图。
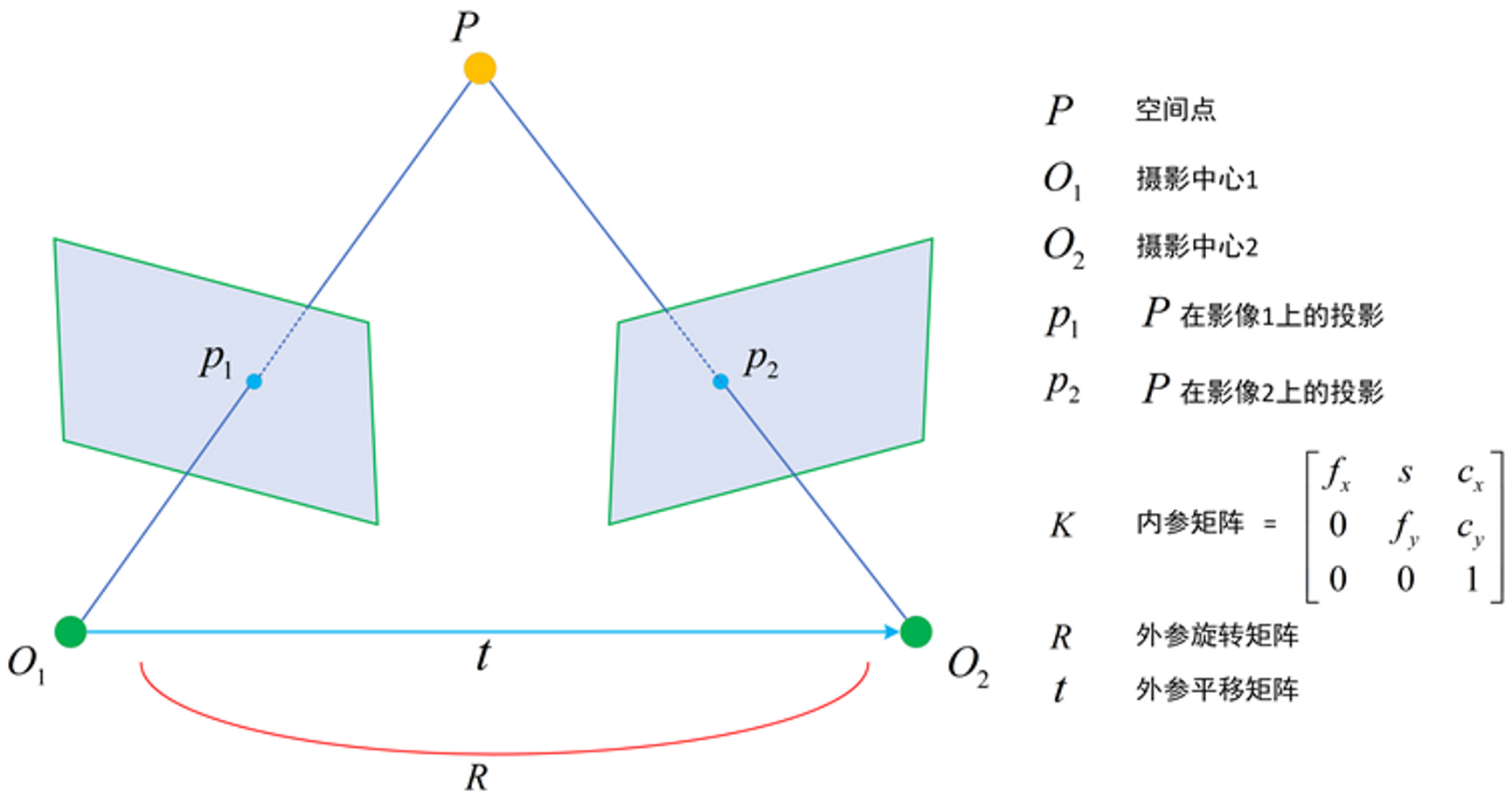
对于R和t,我们给出纯数学上的描述,假设空间点P在左相机相机坐标系下的坐标为$P$,在右相机相机坐标系下的坐标为$P'$,则满足:
$P'=R*P+t$
除此之外,还通常会将双目系统的世界坐标系放在左相机的中心,并和左相机坐标系完全重合,从这个角度来说,R , t R,tR,t就相当于是右相机在世界坐标系下的外参,而左相机在世界坐标系的外参则是$[I,0]$($I$是单位矩阵)。
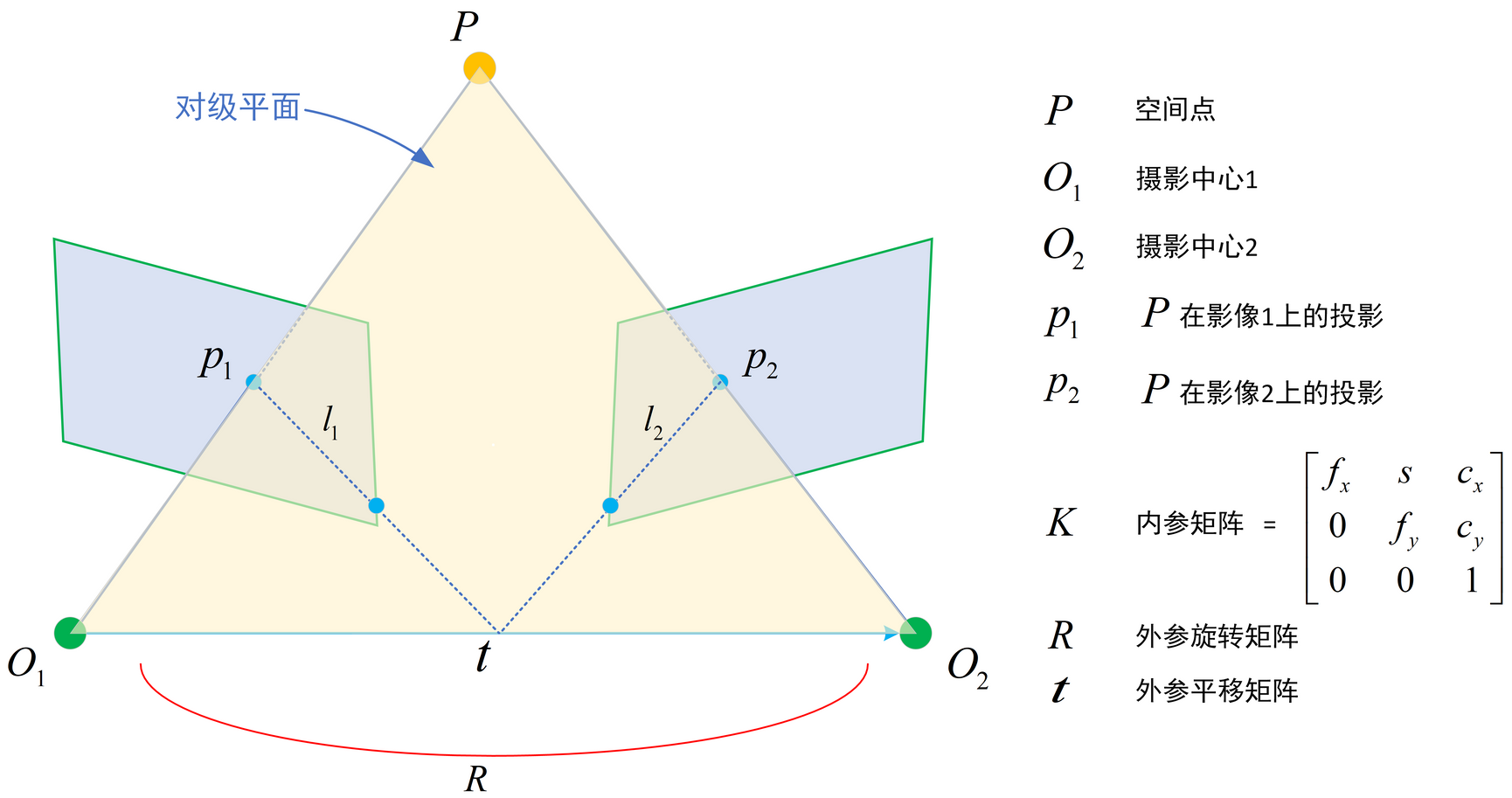
本质矩阵E:Essential matrix和基础矩阵F:Fundamental matrix。得到更简洁的表示形式:
$x_2TEx_1=0,p_2TFp_1=0$
其中$x_1,x_2$是相机坐标系下的坐标,$p_1,p_2$是图像坐标系下的坐标。
本质矩阵和基础矩阵并不是两个像素之间的相互转换关系,而是一种坐标之间的内在约束式
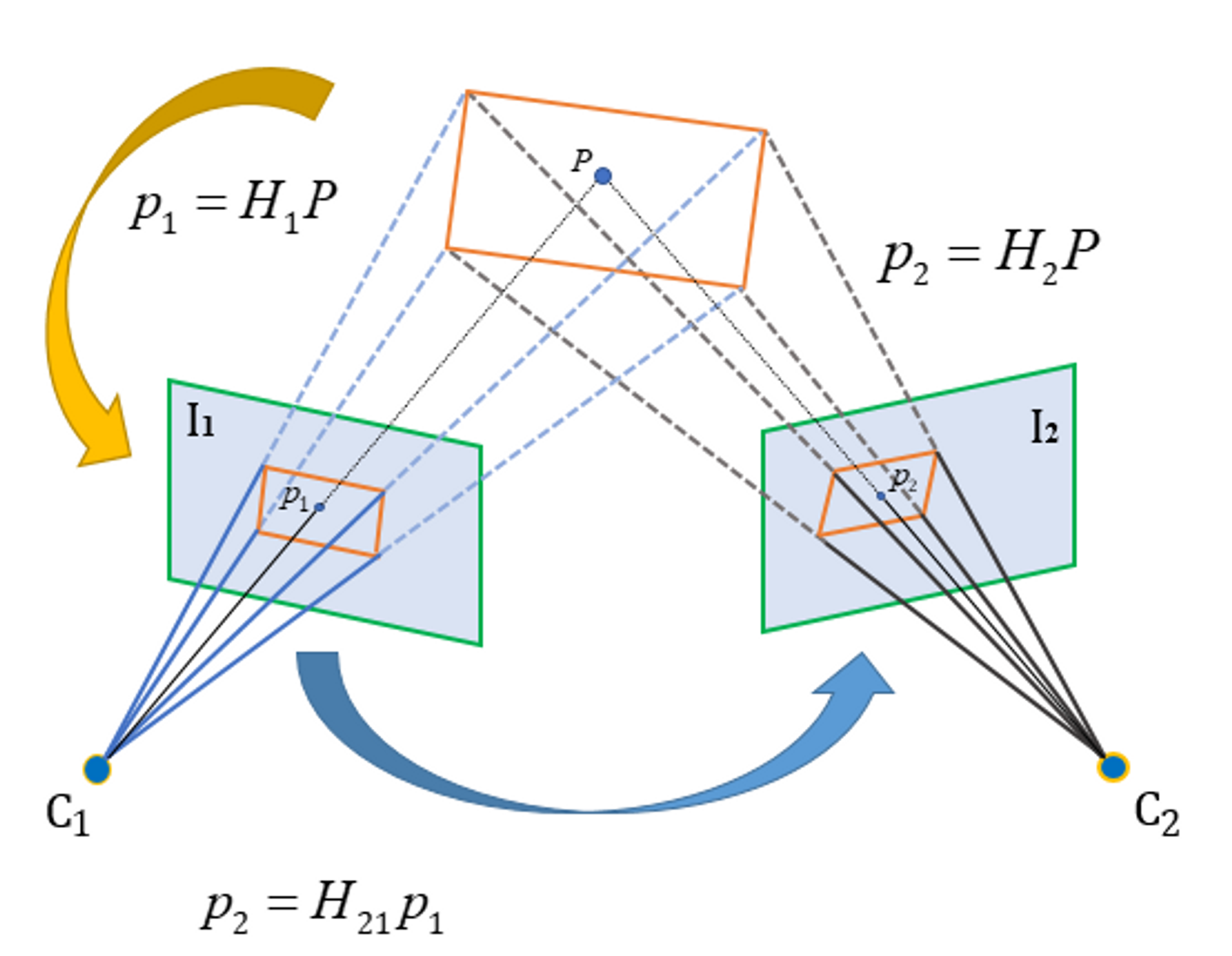
单应性矩阵Homography matrix,但有特定条件:当空间中场景是同一个平面时,它们在左右视图的投影点可通过可逆的单应性矩阵一对一相互转换,表达式为:$p_2=Hp_1,p_1=H^{-1}p_2,$
实际上,单应性矩阵不只是描述同一平面的像素点之间的关系,而是同一个平面在任意坐标系之间都可以建立单应性变换关系,比如影像坐标系与影像坐标系之间,世界坐标系和影像坐标系之间,如下图所示:
在双目立体视觉内,单应性变换是Zhang式相机标定法1的理论基础,纯平的标定板平面和影像平面存在单应性变换关系,同时它们存在世界坐标系到影像坐标系之间的投影变换关系,两个关系对等即可解出相机的内外参数。 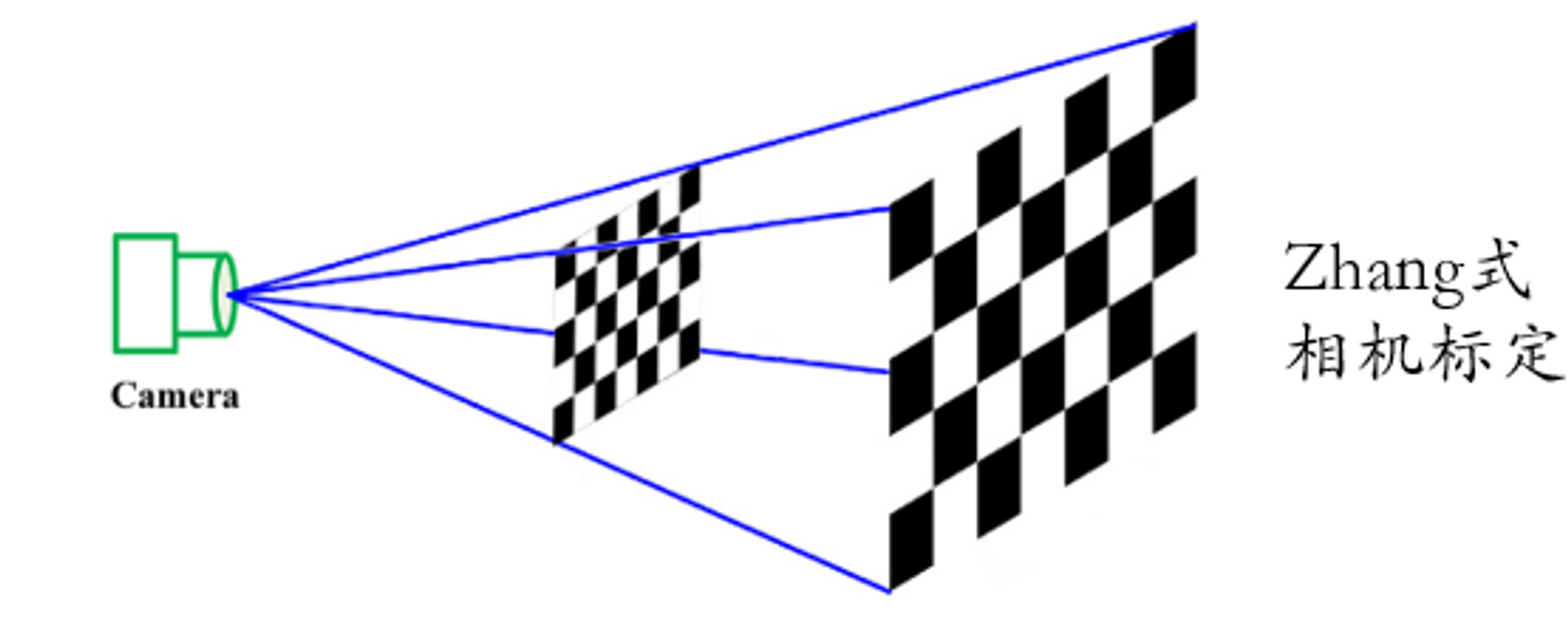 单应性变换的另一个典型应用是图像拼接,将像素点假象成一个局部小平面,并求解局部的单应性矩阵,即可建立两个视图之间像素的一一映射,从而完成拼接。
单应性变换的另一个典型应用是图像拼接,将像素点假象成一个局部小平面,并求解局部的单应性矩阵,即可建立两个视图之间像素的一一映射,从而完成拼接。 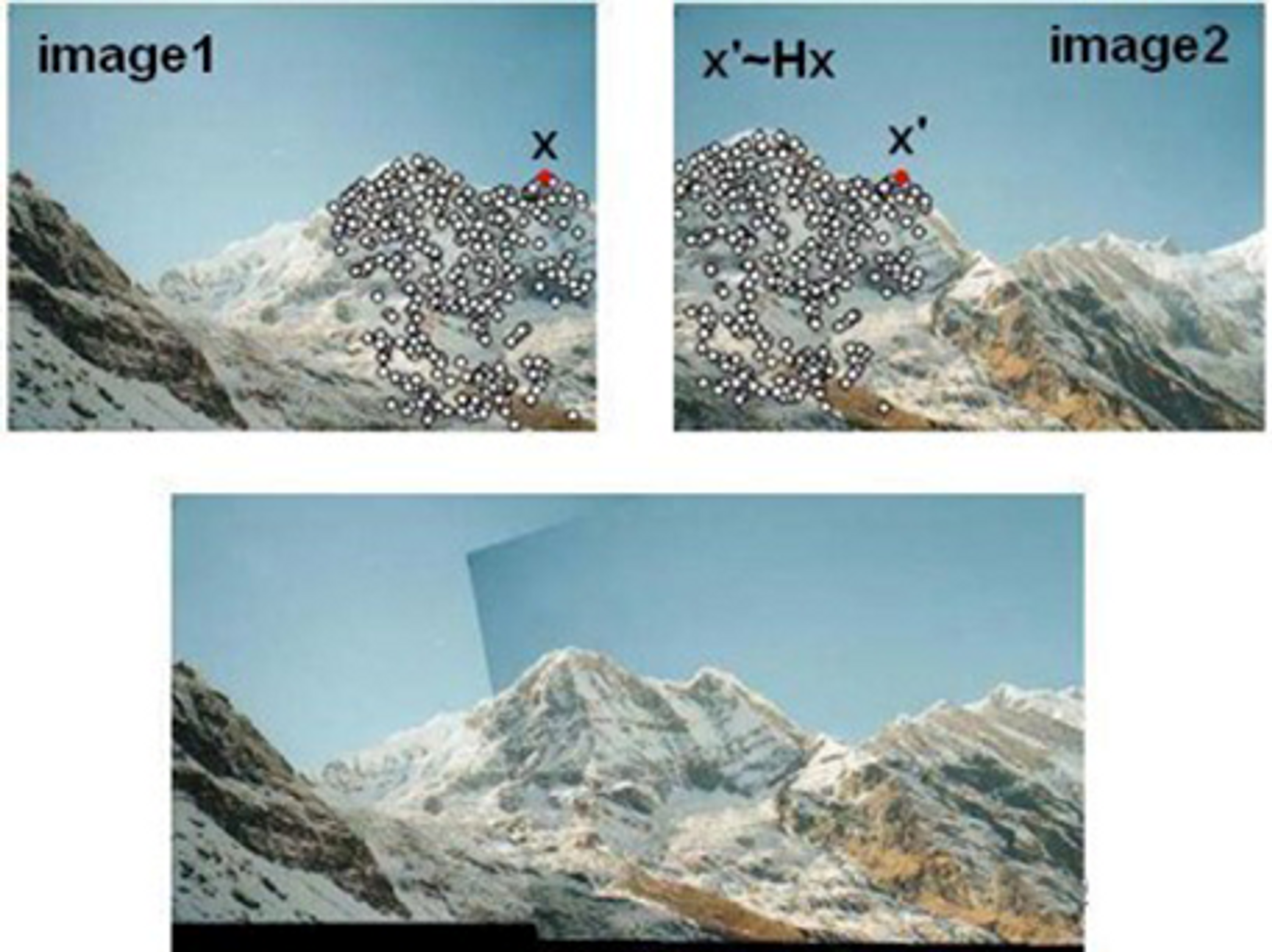
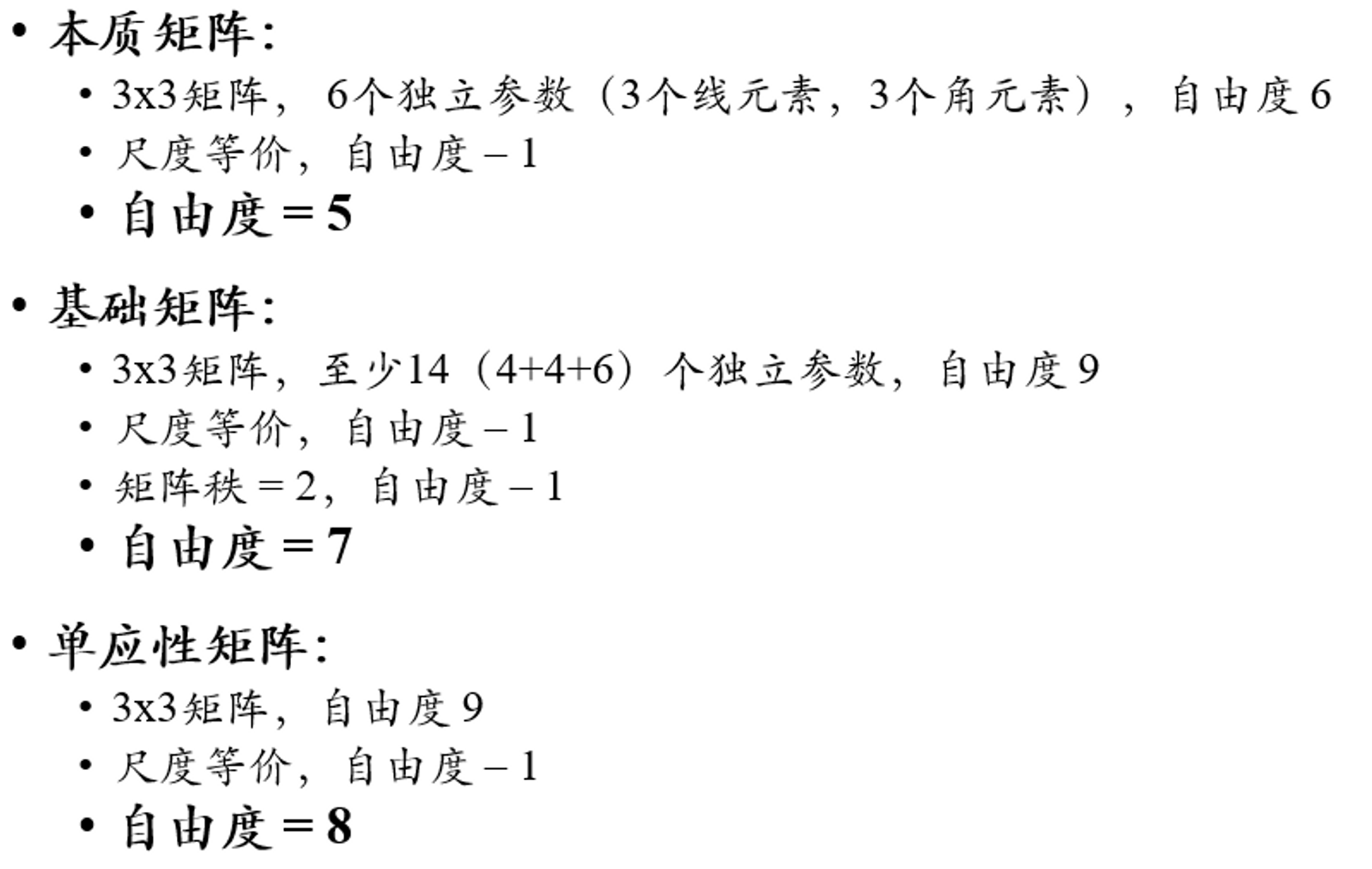
本质矩阵求解 本质矩阵E的自由度是5,一对点可以列1个方程,这表明最少要用5对点来求解;但是由于这5个自由度是非线性相关的,如果要用5对来求解,就涉及到非线性解算,比较麻烦,所以更常见的方法是不按照E的真实自由度,而是只考虑尺度等价性,把E当做8个自由度来求解,最少用8对点,称之为8点法。 假设一对匹配点在左右视图的像素坐标分别为$p_1=[u_1,v_1,1]T,p_2=[u_2,v_2,1]$,左乘内参矩阵K之后的坐标为$x_1=[x_1,y_1,1]T,x_2=[x_2,y_2,1]T$,则根据对极约束$x_2TEx_1=0,$有:
$[x_2 \quad y_2 \quad 1]\begin{bmatrix} e_1 & e_2&e_3 \ e_4 & e_5&e_6 \e_7 & e_8&e_9 \end{bmatrix}\begin{bmatrix} x_1 \ y_1 \1 \end{bmatrix}=0$
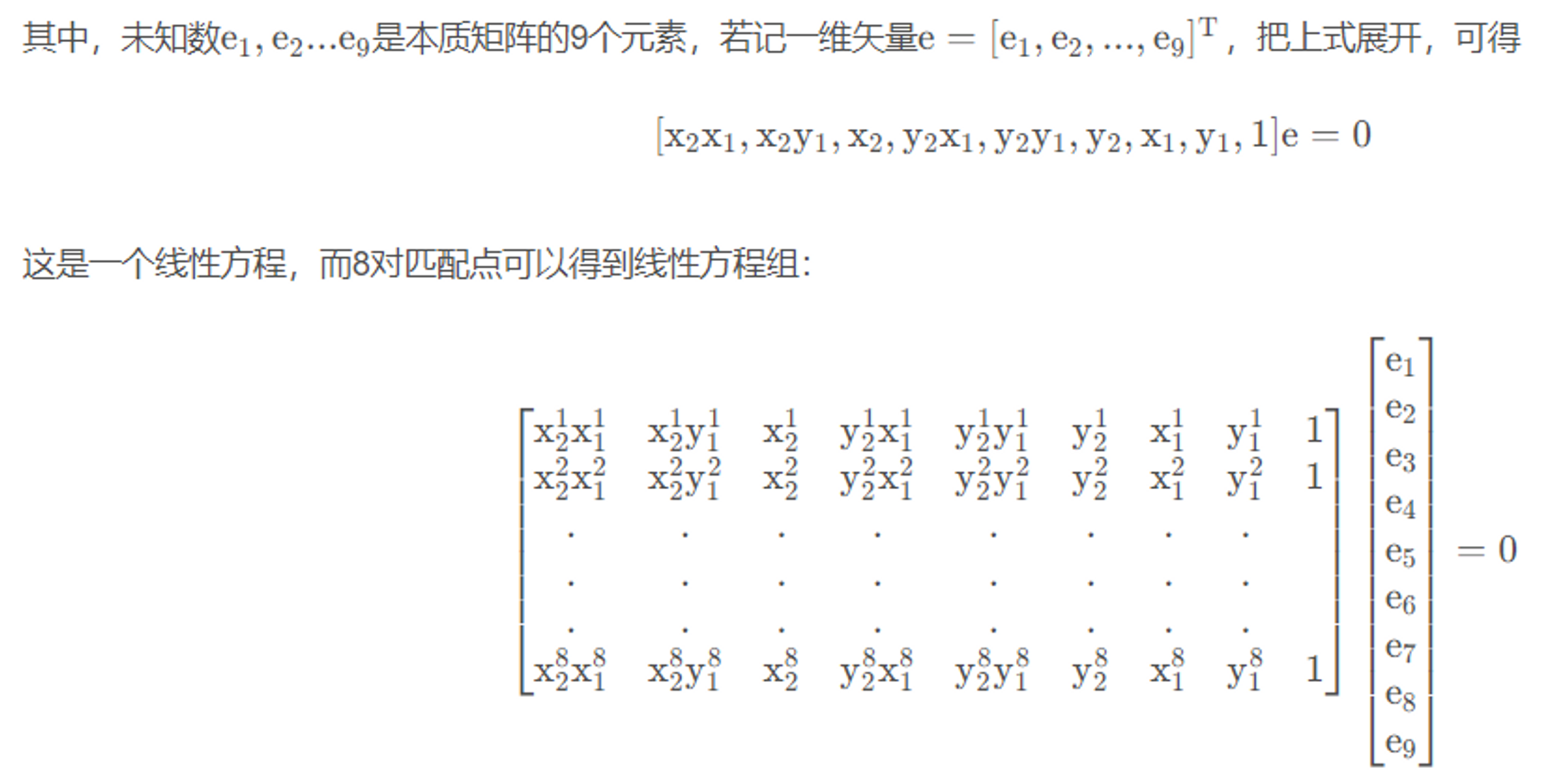
解该线性方程$Ae=0$得到矢量e,即可得到本质矩阵E。矢量e为系数矩阵A的零空间,由线性代数的知识可知方程的特解数为$9-rank(A),当rank(A)=8时$,存在唯一特解,方程所有解均为特解的常数倍,正对应着E尺度不变性的性质。
一般情况下,我们基于大量观测值求最小二乘解:矢量e 是方阵$A^TA$最小特征值对应的特征向量。另外,奇异值分解也是一种解法。
需要注意的是,由于噪声的存在,通过线性方程解出来的本质矩阵,大概率不满足内在性质,即奇异值不是$[\sigma,\sigma,0]$的形式,通常的做法是将奇异值强制调整成$[\sigma,\sigma,0]$的形式,若对求解得到的E进行SVD分解,得到奇异矩阵$\sum=dig([\sigma{_1},\sigma{_2},\sigma{_3}])$,不妨设$\sigma{_1},\sigma{_2}>\sigma{_3}$,则更新E为:
$E=U\begin{bmatrix} \frac{\sigma{_1}+\sigma{_2}}2{} & & \ & \frac{\sigma{_1}+\sigma{_2}}2&\ & &0 \end{bmatrix}V^T$
实际上就是把最小值去掉(最小值大概率是接近0的),让新的σ 取两个大值的平均值。另一种更简单做法是直接让σ=1,因为E的尺度等价性质。
单应性矩阵求解
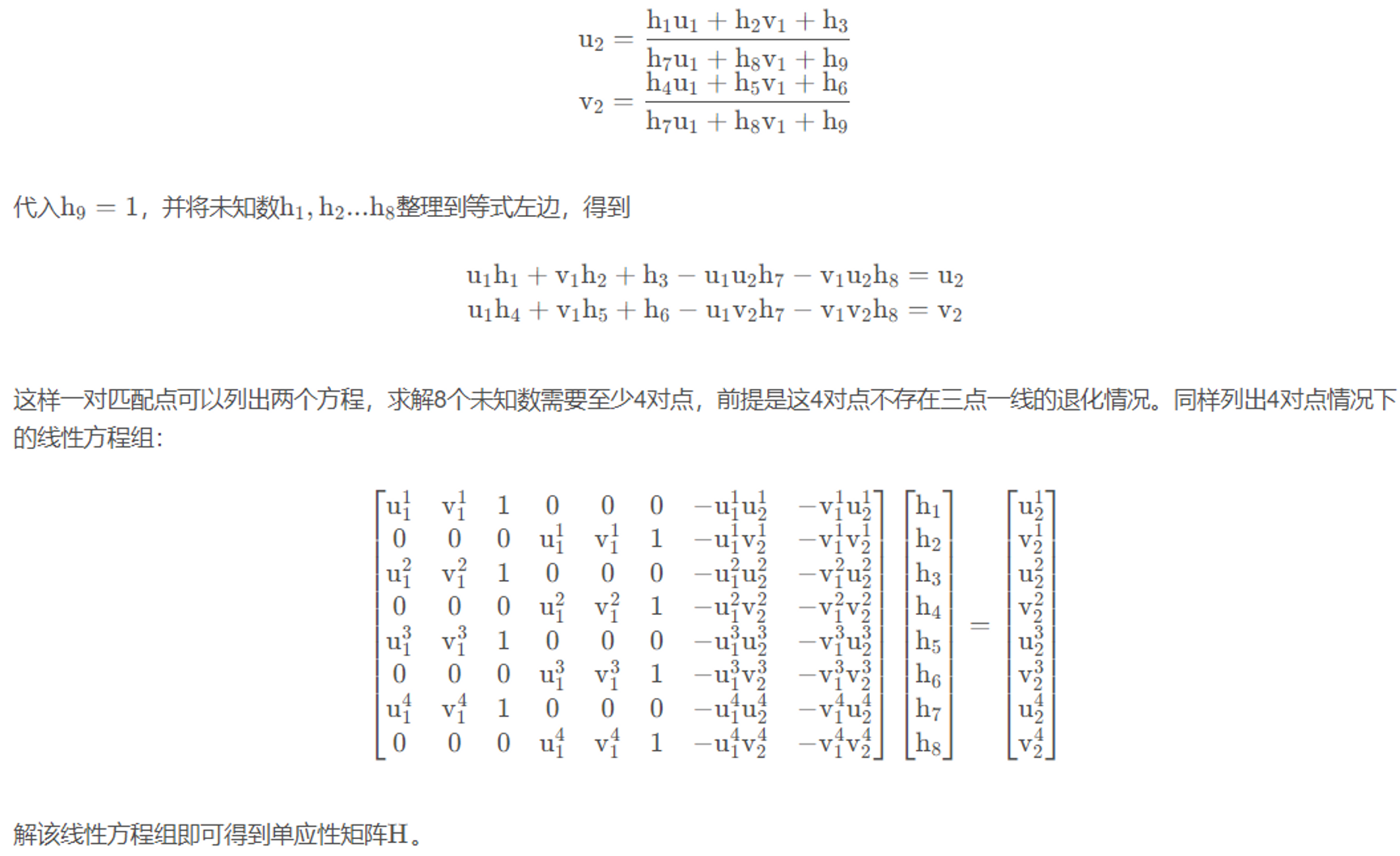
单应性矩阵的自由度是8,一对点可以列2个方程,这表明最少要用4对点来求解。假设一对匹配点在左右视图的像素坐标分别为:
$p_1=[u_1,v_1,1]^T,p_2=[u_2,v_2,1]$,则根据对极约束$p_2=Hp_1$,有:
$\begin{bmatrix}u_1\v_1\1\end{bmatrix}=\begin{bmatrix} e_1 & e_2&e_3 \ e_4 & e_5&e_6 \e_7 & e_8&e_9 \end{bmatrix}\begin{bmatrix} u_2 \ v_2 \1 \end{bmatrix}$
上式具有尺度不变性,即H可以乘以任意非零常数,那我们不妨让$h_9=1(即H除以h_9)$,按照齐次公式的常规处理方式,我们会让第1,2行除以第3行以去除尺度因子,可得: