SLAM概述
约 621 字大约 2 分钟...
提示
SLAM概述
经典SLAM:视觉里程计、后端优化、回环检测、建图
1、三维刚体运动:主要内容就是坐标
理解左乘是基于自身坐标系,右乘是基于基坐标系
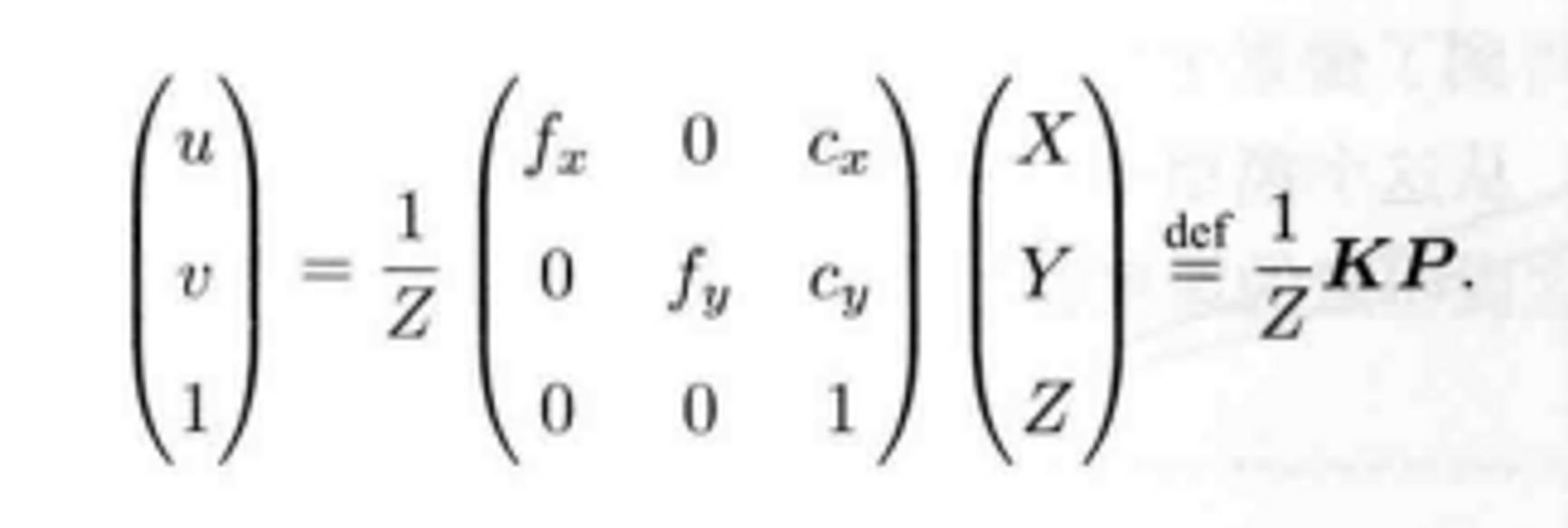
3、相机和图像:针孔相机模型、3D视觉

2、李群代数没有具体了解过
4、非线性优化
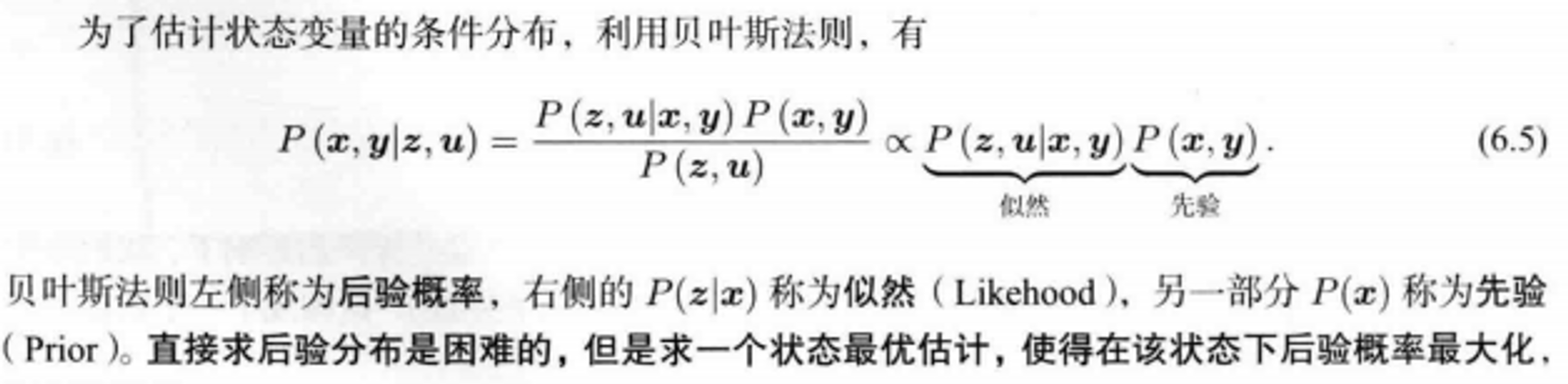
状态估计问题:
曲线拟合:使用Ceres、g2o曲线拟合
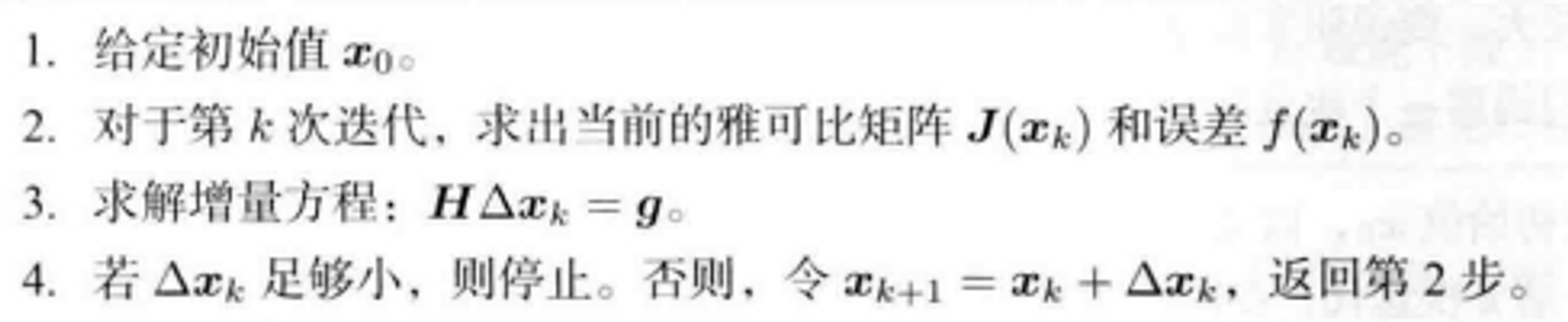
非线性最小二乘:一阶和二阶梯度算法、高斯牛顿法、列文伯格法

5、视觉里程计
6、多视图几何
记住几个基本概念:
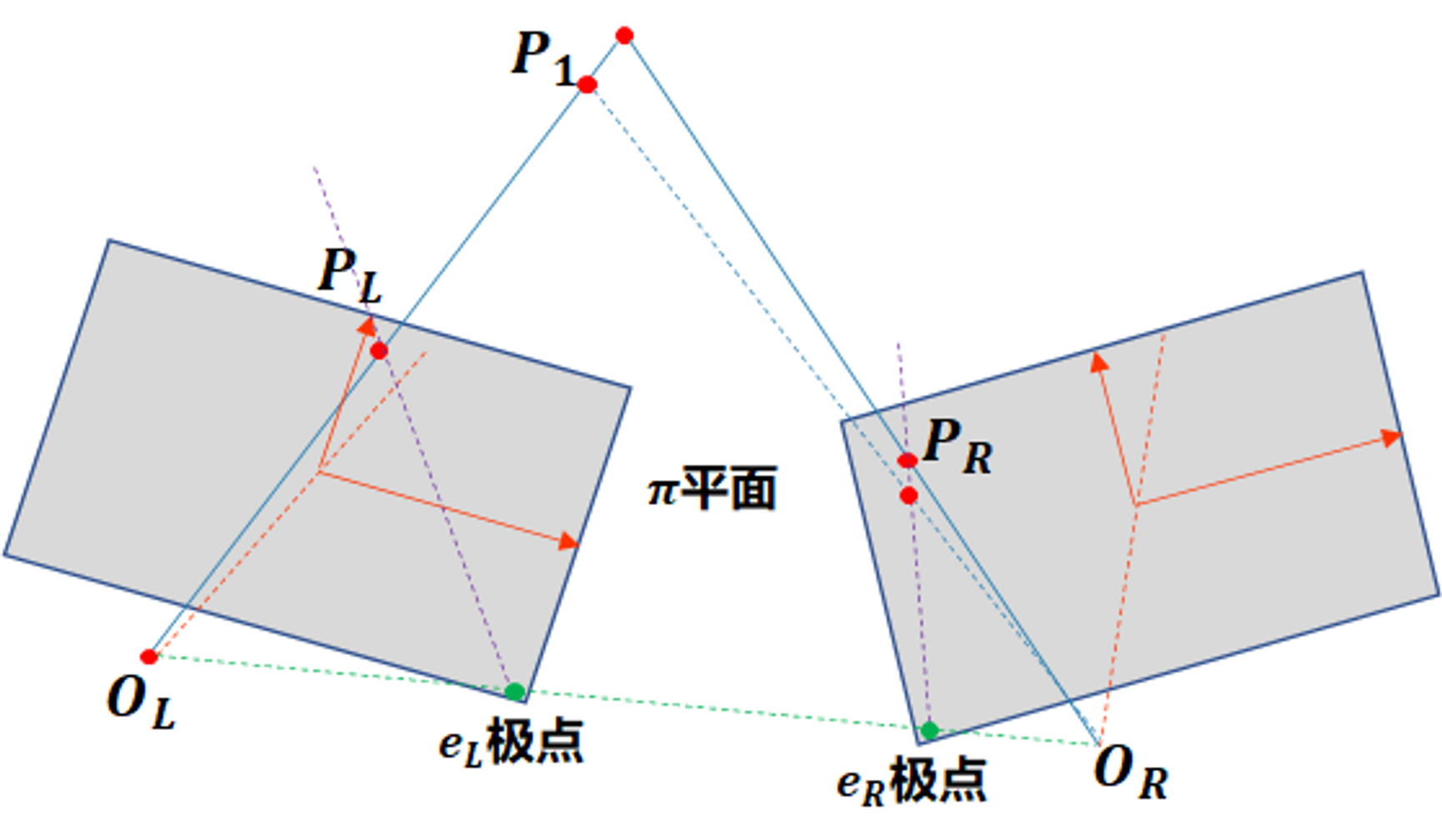
空间一点P在左右两个相机成像平面的对应点分别为$P_L和P_R$
************极平面:空间点P与左右相机光心$O_L和O_R$构成的平面
极线:极平面与左右相平面构成的交线叫做左右极线
极点:左右光心与相平面的交点叫做左右极点
极线约束:空间点P在左相机的投影点为$P_L$,将可能在右相机上存在无数个点与它对应,但是这些点一定都在所对应的右极线上
对极约束的几何含义是$P、O_L、O_R$三点共面
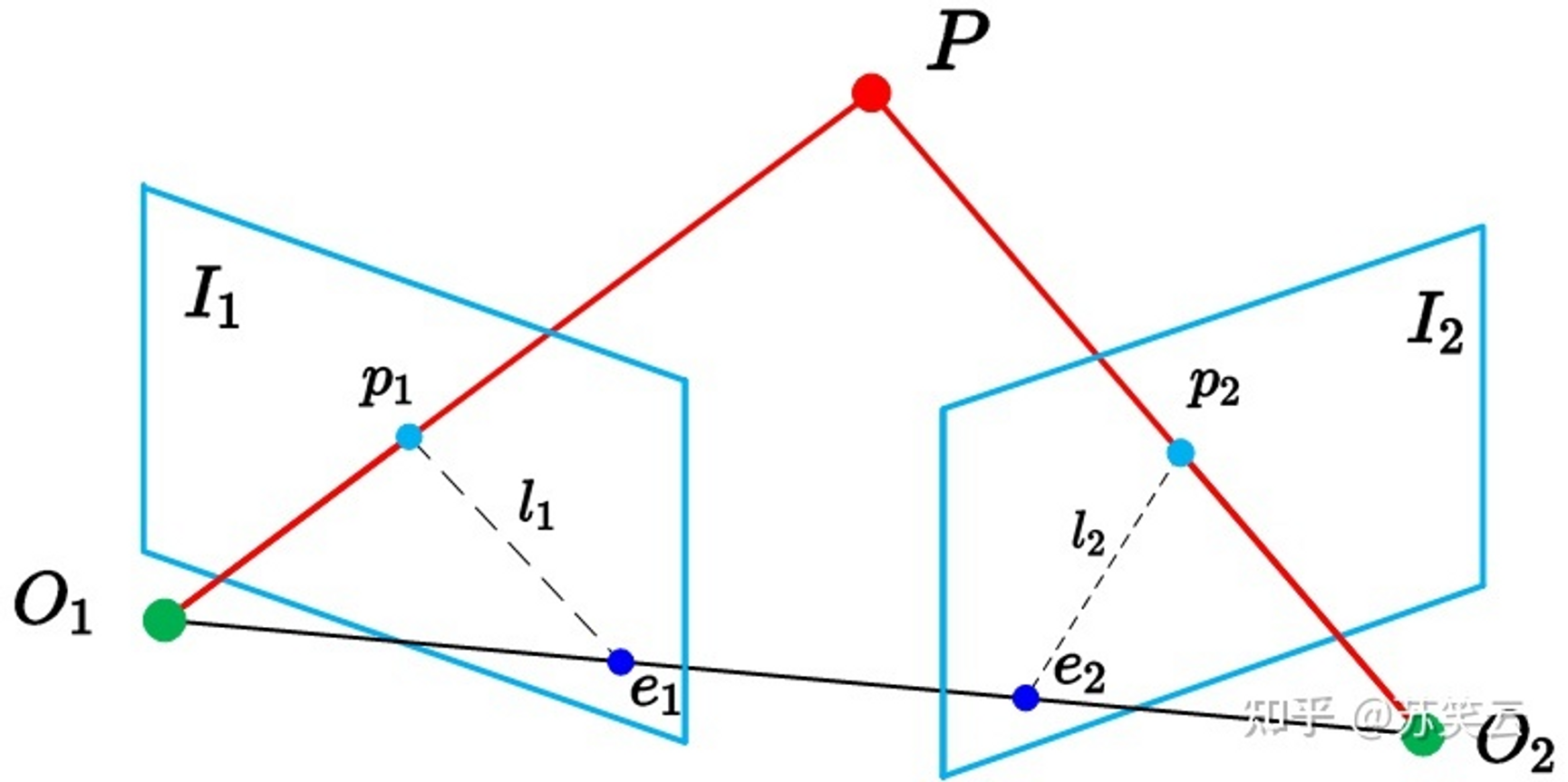
存在如下所示的对极约束,其中x1,x2是归一化平面上p1,p2对应的坐标点:
$x_2TEx_1=p_2TFp_1=0$ 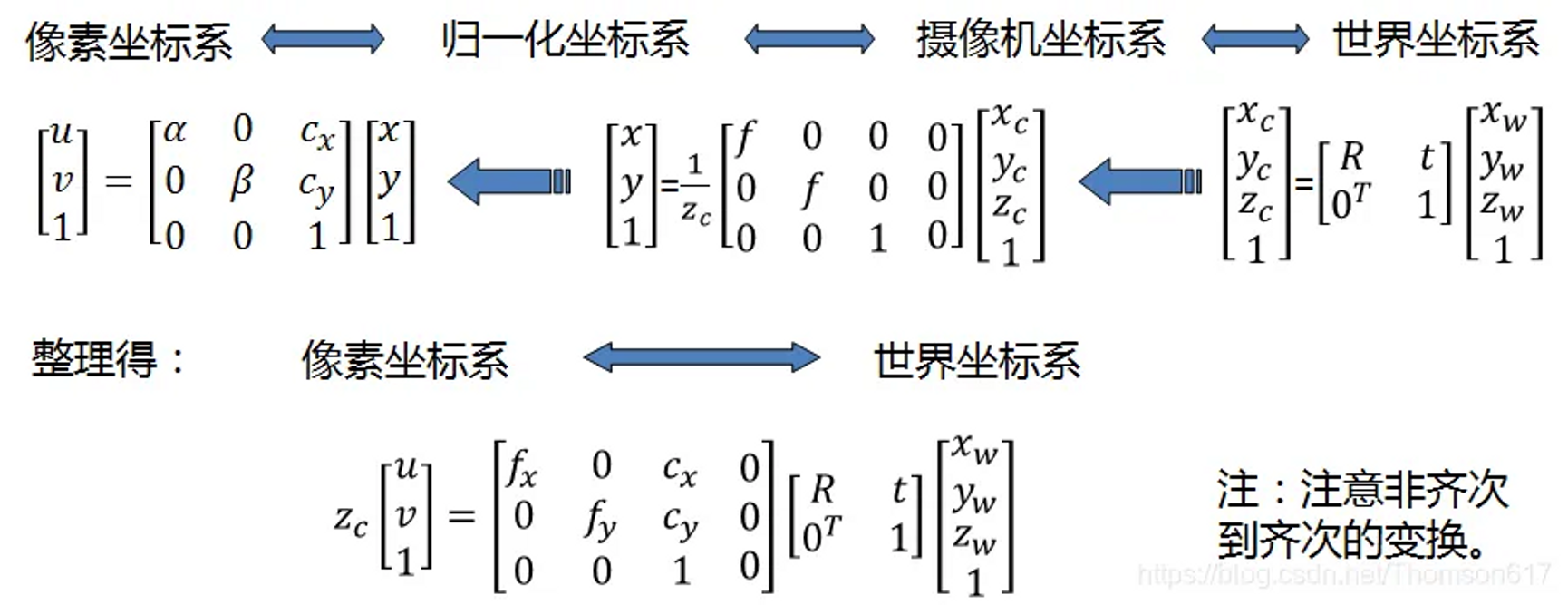
本质矩阵:$E$,是反映【**空间一点P的像点】**在【**不同视角摄像机】**下【相机坐标系】中的位置关系。
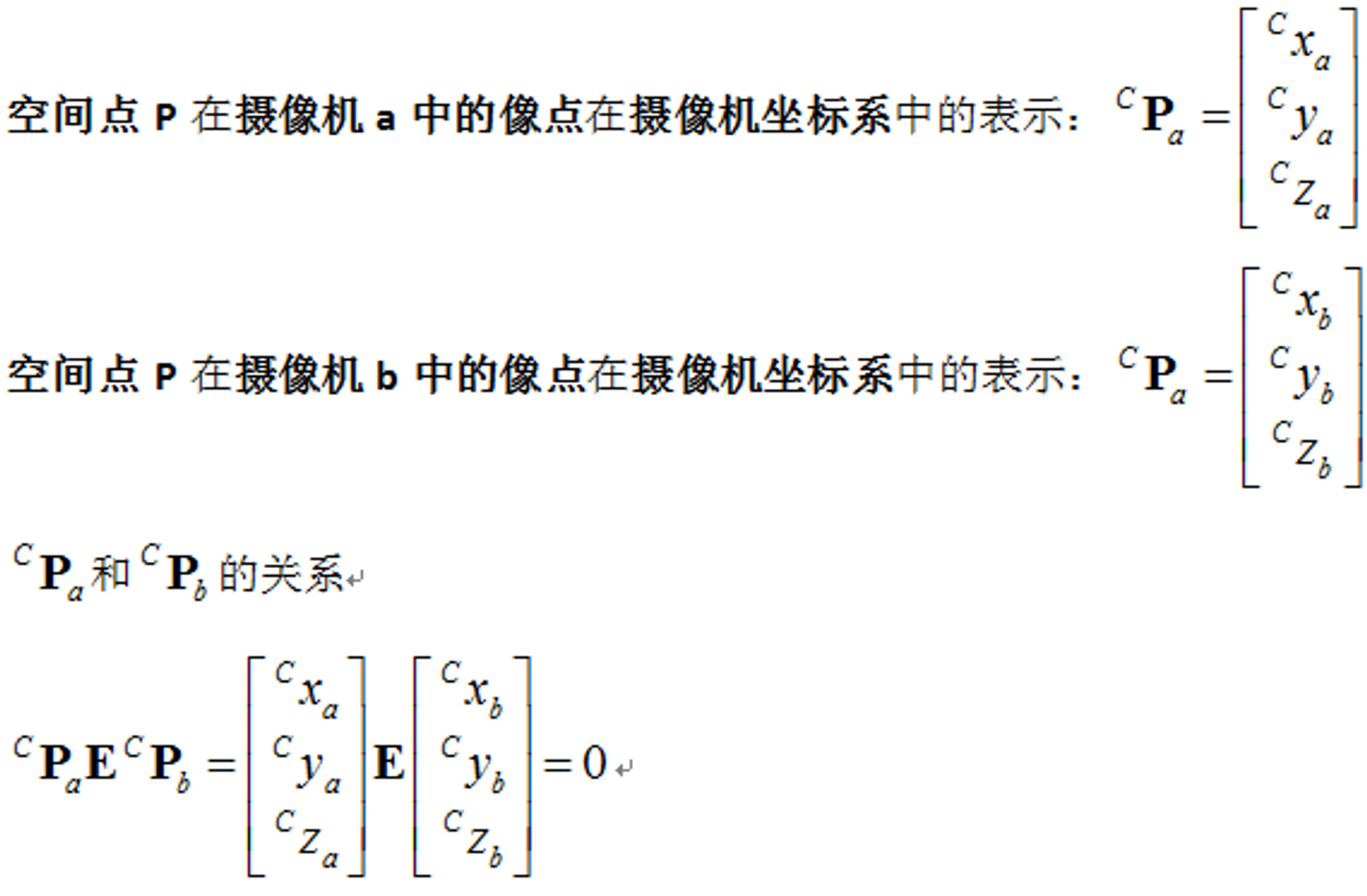
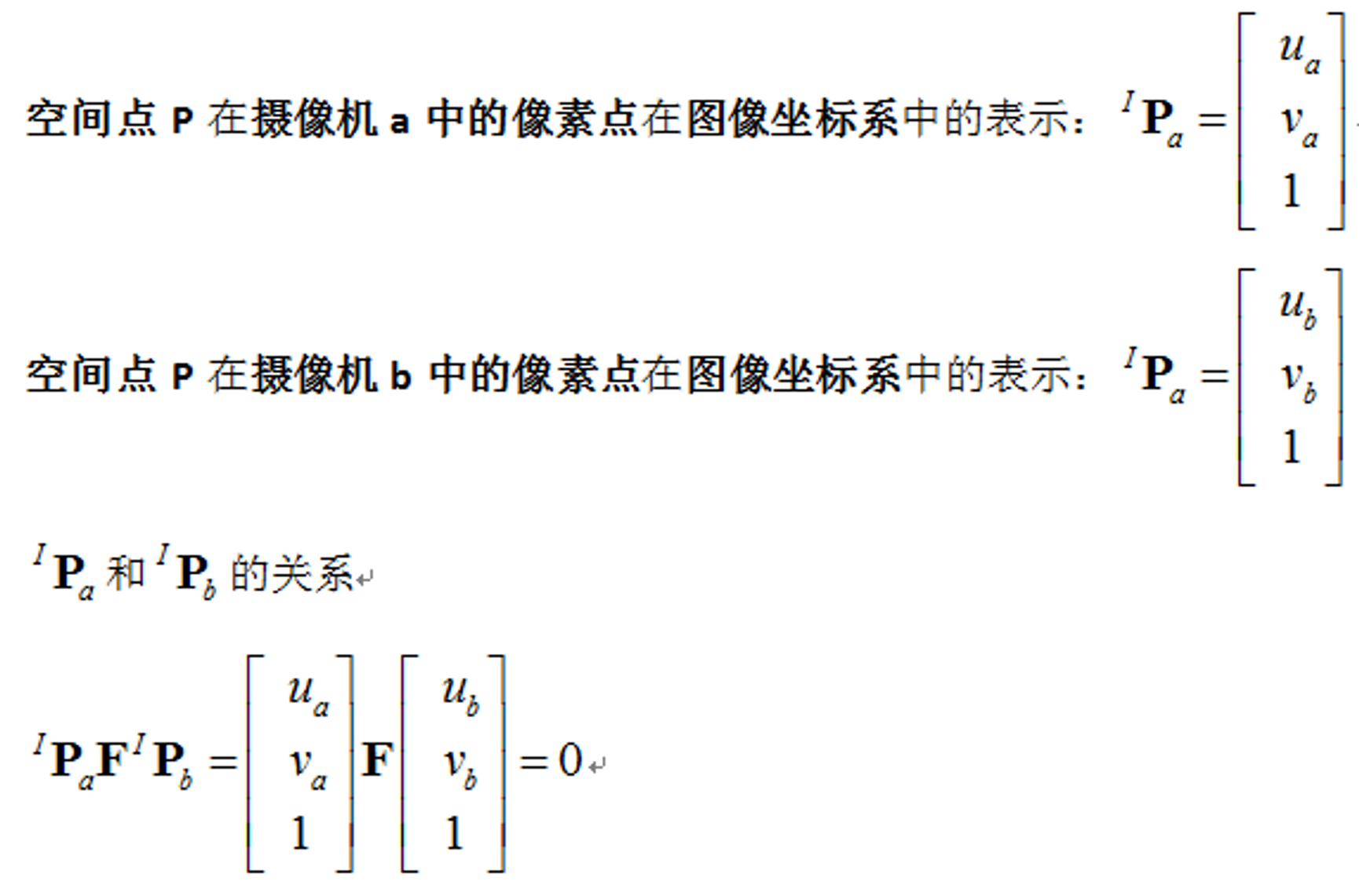
基础矩阵:$F$,反映【**空间一点P的像素点】**在【不同视角摄像机】下【图像坐标系】中的位置关系。
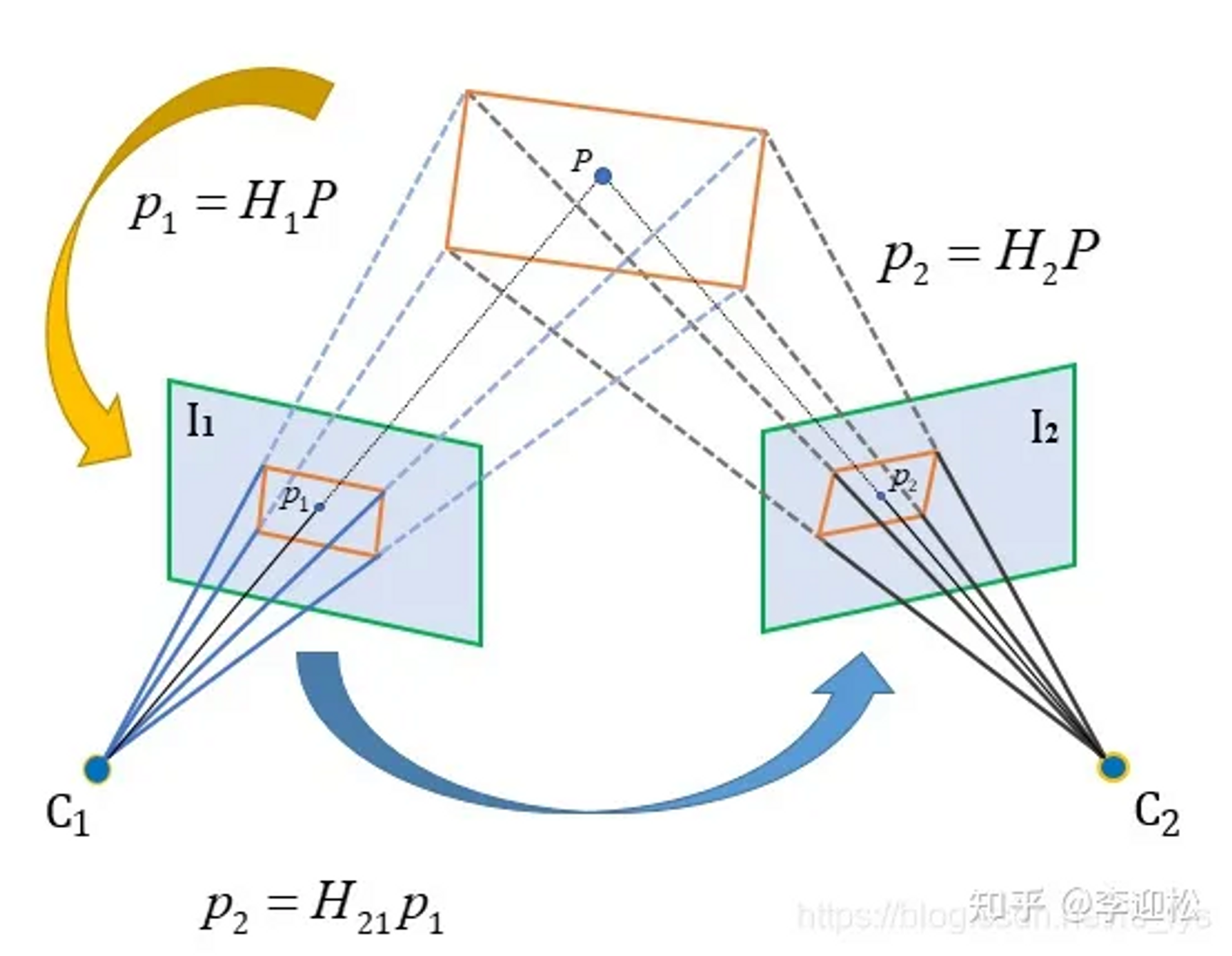
**单应性矩阵:**平面的单应性被定义为一个平面到另外一个平面的投影映射。单应性矩阵不只是描述同一平面的像素点之间的关系,而是同一个平面在任意坐标系之间都可以建立单应性变换关系,比如影像坐标系与影像坐标系之间,世界坐标系和影像坐标系之间,如下图所示。